Paso novedades, Raul ha construido el paracaidas y está testeando la caida de 1kg desde 100m de altura mientras mis niños y yo andamos liados con el robot del cual estamos construyendo un prototipo para aprender a manejar los sistemas de navegación por GPS por lo que no nos hemos ajustado a las medidas especificadas en la normativa CanSat OpenClass que es donde estamos inscritos…
Ah… ¡¡ ya estamos inscritos !! somos el equipo Payload-xBot y por lo que veo nuestros rivales directos de categoria son iranies… http://fly.leem.es/inscrebed-teams/
Podemos ver caras conocidas como el equipo Sytek del compañero Juanjo de la asociacion de robotica y varias universidades españolas que se van sumando poco a poco.
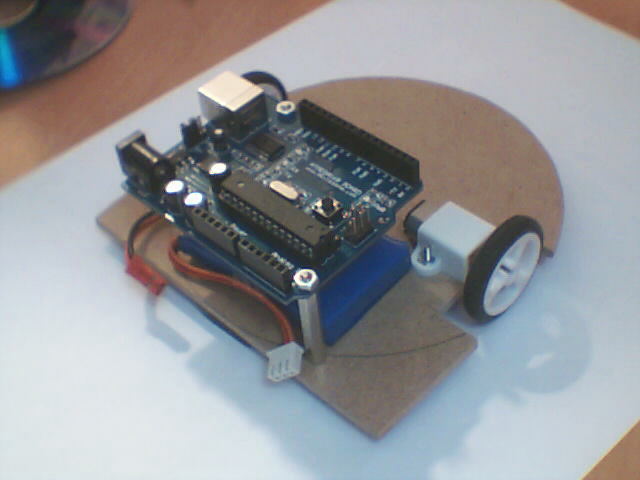
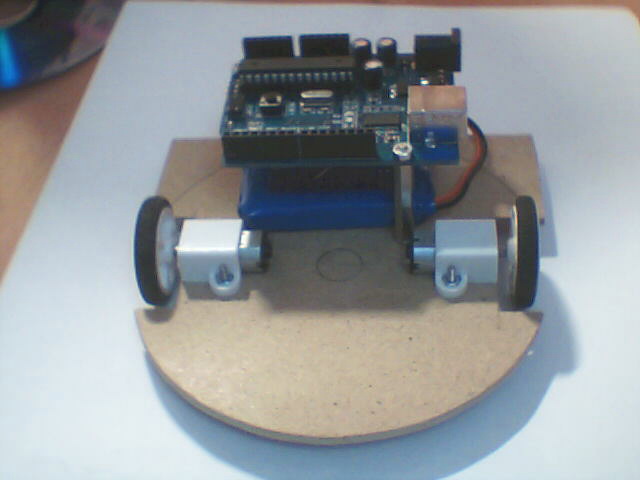
Bueno, las fotos de la evolución del proyecto…
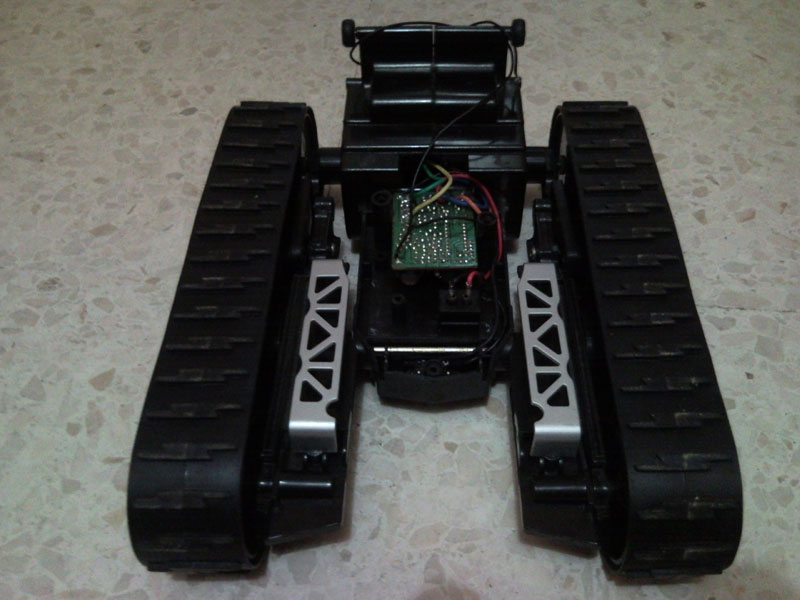
Foto 1 – Cimientos – Motorización y orugas sacada de un tanque de radio control.
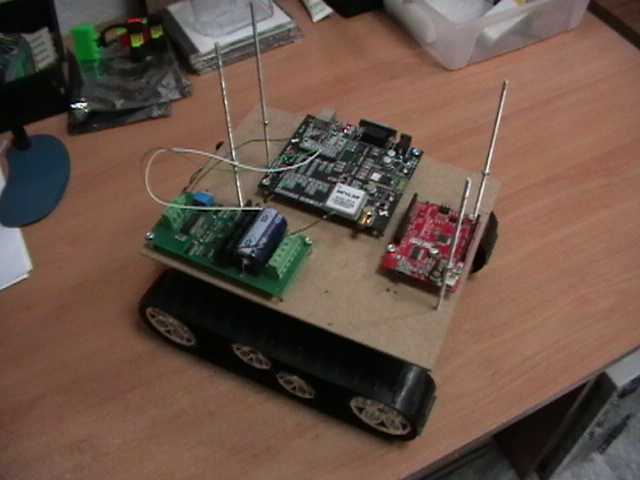
Foto 2 – Primer piso – microcontrolador, etapa de potencia y GPS.
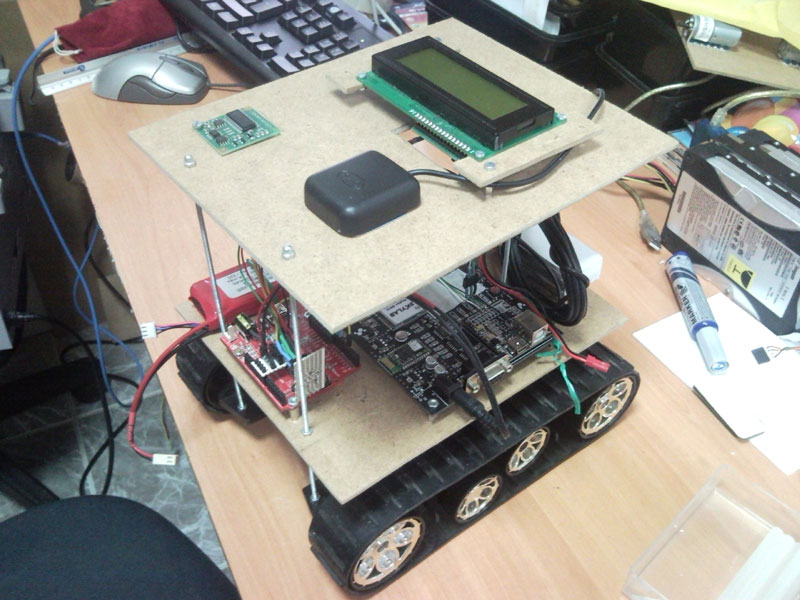
Foto 3 – Segundo piso – LCD 20×4, brujula electrónica y antena GPS.
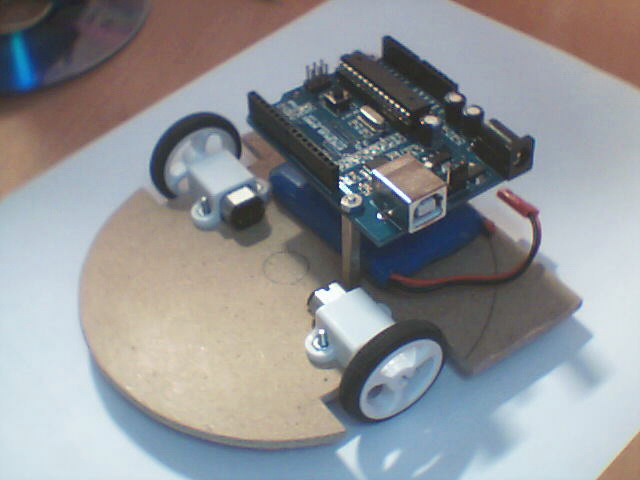
Foto 4 – Estado actual del conjunto cableado y probados todos los sistemas.