Tarribot queda en segunda posición en la prueba de Robotrackers en la CampusBot.
Contra todo pronostico TarriBot ha hecho un insospechado campeonato en la prueba Xtreme RoboTrackers de la CampusBot, no voy a negar que interiormente tenia la ilusión de hacer un buen papel pero el sentido común me decia que tenia pocas posibilidades, lo cual se confirmó cuando en la prueba de homologación TarriBot quedó en 8º lugar con 7 robots tipo "sniffer" por delante… los robots de este tipo están especialmente indicados para este tipo de pruebas de siguelineas al contrario de TarriBot que tiene tracción diferencial que ha quedado casi obsoleto para estas competiciones.
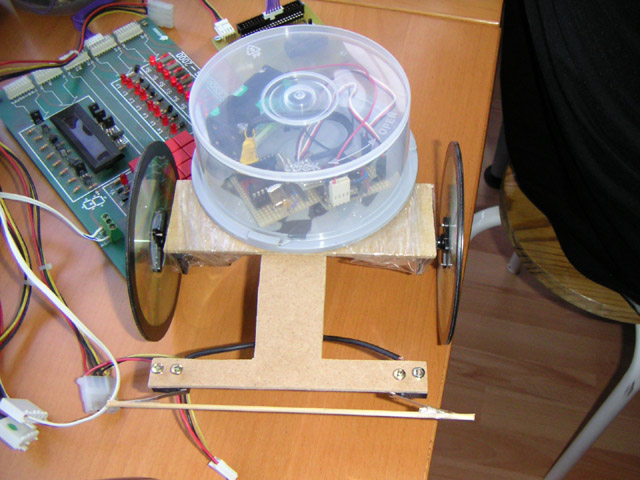
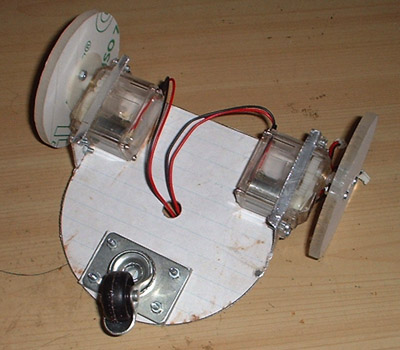
¿Por que este exito entonces?… sencillamente por una cosa en la que nadie y ni mucho menos yo habiamos pensado… la prueba Xtreme RoboTracker de la CampusBot usa dos pistas paralelas que se cruzan en algún momento del camino existiendo por tanto la posibilidad de choques y aqui reside el exito de TarriBot, al tener dos motores y tracción diferencial ademas de su chasis rígido y las mega-ruedas que le calzé salia airoso de casi todos los choques de lo cual pueden dar fé tanto Slider (semifinal) como Alumibot (cuartos de final), sobre todo a este último de mi compañero Antonio al que por desgracia TarriBot pasó por encima rompiendole un sensor.
El único que se salvó de las ruedas de TarriBot fué el flamante ganador que venció en la final de forma mas que merecida… Tarribot entró en las dos carreras a poco tiempo del ganador lo que me dejó un buen sabor de boca a pesar… de no ganar.
Fotos, Blacky (1º), TarriBot (2º), Slider (3º), Minerva 2 (4º).




Por localidades esta prueba cambia poco de año en año….
2005 -> 1º-Marbella 2º-Malaga 3º-Malaga 4º-Madrid
2006 -> 1º-Madrid 2º-Marbella 3º-Madrid 4º-Marbella
Fotos de los ganadores y premio.



TarriBot, club de fans… aqui teneis a Damontar y Maria con sus Tarribots, faltan dos mas, el de Reb y el de UCFort que aunque esté solo el chasis ya forma parte de la familia.

Un breve repaso a mas cositas CampusBot, fotos de mis compañeros Angel y Antonio.



Y para terminar foto de la reunión del equipo EuroGolfus que ya participó en Eurobot 2006 y volverá en 2007 hasta que nos aburramos… ya que UCFort vive en Ibiza y Angel y yo en Marbella esta es una de las pocas ocasiones al año para reunirnos.

Saludos a todos.
furri.