Es la segunda Arduino que rompo, la primera llevaba micro Atmega168 en smd y gracias a Boops la pude recuperar, pero el otro dia trabajando con los velocistas de Cosmobot rompí otra pero esta con el micro en formato DIP, o sea… de las normalitas, concretamente una Duemilanove con Atmega328.
Ante todo decir que esa placa, la Duemilanove puede llevar un Atmega168 sin problemas y nos puede servir para grabar el bootloader en nuestro flamante micro nuevo… y vacio… 😛
Bien, lo primero es construiros un programador, no os asusteis, este me lo he hecho en 15 minutos.


La construccion es muy facil, aqui teneis las instrucciones en la web oficial de Arduino.
Como construir un programador por puerto paralelo para Arduino
Aqui teneis el esquematico: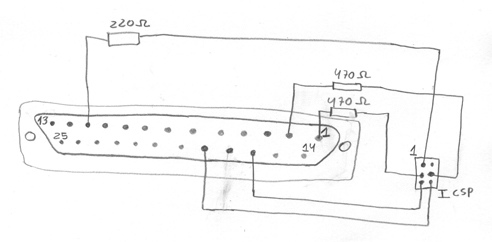
Una vez construido haceis lo siguiente:
– Enchufais el programador al puerto paralelo (la arduino aún no la enchufeis).
– Descargaros este fichero y descomprimidlo en cualquier carpeta temporal.
– Para instalar giveio teneis que ejecutar ginstall.bat, aparecerá una pantalla negra (tipo msdos) que durará un instante.
– Para evitar problemas con el acceso al puerto paralelo desde Windows XP haceis doble click en XP_stop_polling.reg, el sistema o el propio antivirus os advertirán de que se van a escribir entradas en el registro de windows, bla, bla, etc, etc… ni caso, palante…
– Resetear Windows (esto es aconsejable, a mi no me funcionó hasta hacerlo).
– Enchufad la Arduino y buscar el puerto COM asignado en el panel de control.
– Abrir Arduino-001x (yo lo he probado con la versión 14, de ahí para arriba irá bien), configurais el puerto y el tipo de tarjeta como si la arduino funcionara normalmente.
– Enchufad el conector ICSP de la Arduino al programador.
– Ejecutad en el menú de Arduino… 
y a los 15 segundos (mas o menos) os deberia aparecer un mensaje indicando que el bootloader se ha grabado correctamente.
– Desenchufais la Arduino del programador.
– Abris un programa de ejemplo como el… Blink y probais a ver si graba correctamente.
Que lo disfruteis.
furri.

 http://www.xbot.es/ezkybel
http://www.xbot.es/ezkybel