Como sabeis el software de Pingubot es el del proyecto Pinguino, obra de Jean Pierre Mandon el cual se ha hecho eco de nuestro taller en el OSHWCon y lo ha publicado tanto en su blog personal como en el blog oficial del proyecto Pinguino.
Hemos tenido que pedir 70 placas, 20 para el taller, 44 de encargos salidos del foro de la asociacion de robotica y el resto ya se usarán.
En breve lo pondremos todo en la web http://pingubot.xbot.es y se abrirá el plazo de inscripción para el taller que desarrollaremos en el OSHWCon, me adelanto un poco y avisamos a los interesados en asistir al taller de que deben solicitar entrada a las jornadas en este enlace:
I think that Microchip deserves our thanks about samples program, the main electronic components of this robots (and many others) are samples. Creo que Microchip se merece nuestro agradecimiento por su programa de samples, la mayoria de los componentes principales de este robot (y de muchos otros) son muestras gratuitas.
Ya tenemos el proyecto completito, os podeis descargar el código fuente y la plantilla con el PCB, está hecho con el programa ExpressPCB, es un programa gratuito pero si no quereis descargarlo teneis la plantilla en PDF lista para imprimir.
– pingubot_vel_1.0.pde
– pingubot_vel_1.0.pcb
– pingubot_vel_1.0.pdf
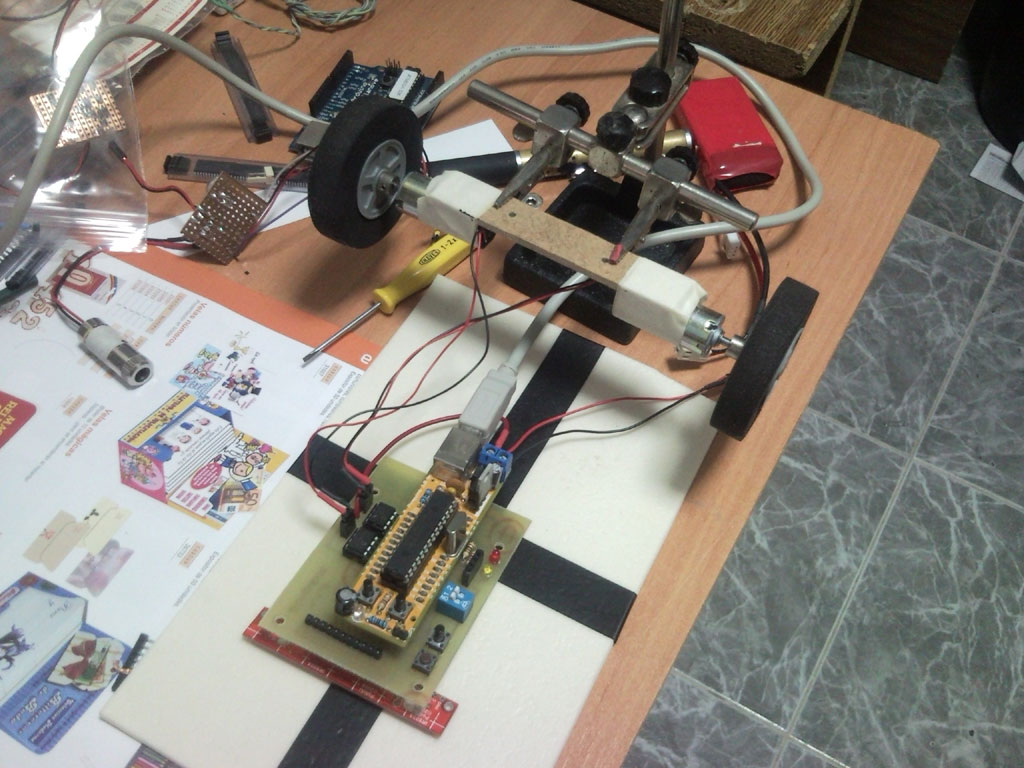
Y tenemos el primer video del montaje y robot funcionando.
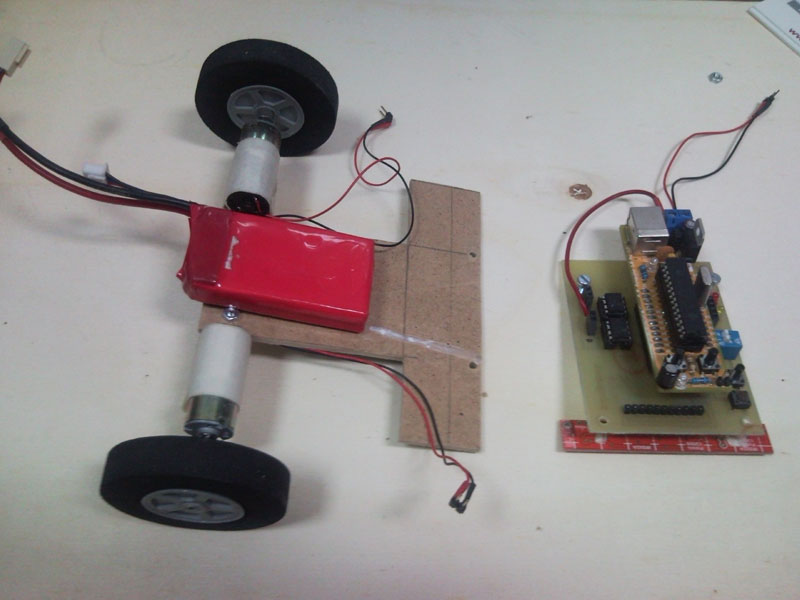
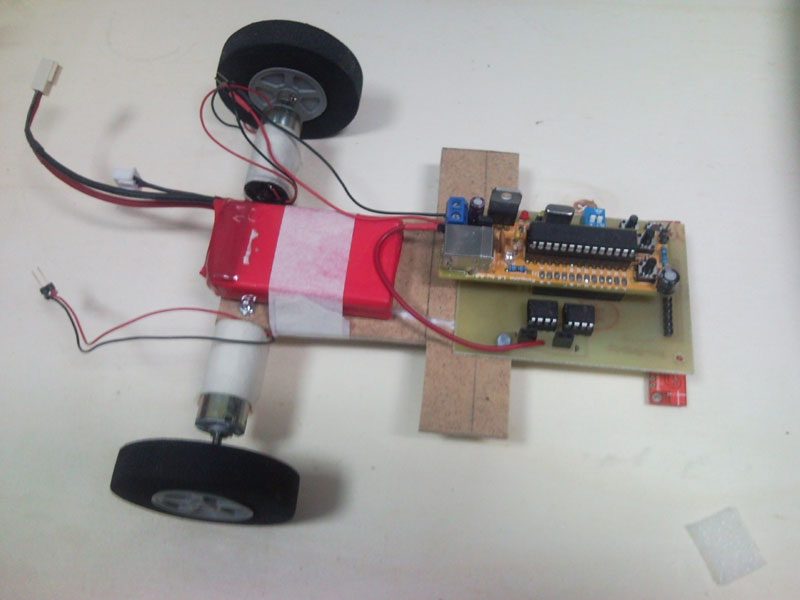
Esto marcha… acabo de montar el primer robot con la placa pingubot, realmente no he tenido mas que reutilizar los motores de TarribotV, un trozo de tablero para el chasis y una bateria, lo mas complicado de todo ha sido el tercer apoyo que con un trozo de teflón ha quedado fantastico.
Si, se que no es un nombre original pero refleja lo que es, una placa controladora para robots basada en el proyecto pinguino de JP Mandon.
Es una versión mejorada de la placa de Tarribot 2.0 que empecé hace como un año, justo antes de la Campus Party Europa, pero esta vez en PCB, dejando a un lado las placas de prototipos y mejorando la estetica con un montaje mucho mas limpio sin cables.
En esta primera versión el uso será para rastreador/velocista y para compatibilizar con otros diseños he dejado los pines de entrada compatibles con el array de sensores de pololu. para configuracion he dejado dos pulsadores, dos interruptores y dos leds aunque estos ultimos enchufados a los pines Tx y Rx.
No se puede decir que el proyecto pinguino haya pasado desapercibido, desde que hace dos años Jean Pierre Mandon publicara el prototipo pinguino 2008 el proyecto se ha extendido y no ha dejado de crecer, a dia de hoy aqui en nuestro pais podemos unirnos a dos comunidades que ayudan en la continuidad del proyecto y donde te puedes conseguir tu PCB en algún pedido conjunto para reducir costes.
Lo conseguí…. creia que iba a tardar mas pero en cuanto le he echado un rato ya está en marcha.
Guia de instalación Aqui o bien…
Si tienes que instalar en windows aqui teneis pasito a pasito el proceso de instalación que he realizado.
1.- Descargar e instalar Python252
2.- Descargar e instalar wxPython28win
3.- Descargar e instalar PyUSB
4.- Descargar e instalar libusb (este tuve que instalarlo varias veces)
5.- Descargar y grabar un pic con el bootloader bootloader4550V2-12.hex (vale para el 2550)
6.- Descargar y descomprimir el Driver para windows
7.- Descargar y descomprimir el entorno de desarrollo Pinguino Beta 7
Una vez instalado todo esto y grabado el PIC con el bootloader lo montamos el la placa pinguino y continuamos:
8.- Enchufar la placa pinguino al USB del ordenador, esperar a que nos pida el driver e indicar la carpeta donde lo habiamos descomprimido.
9.- Abrimos la carpeta donde hemos descomprimido el IDE pinguino Beta 7 y hacemos doble click sobre «pinguinobeta7.py»
10.- Listo para programar, se abre una pantalla clavadita a la de Arduino pero en este caso no tenemos que seleccionar ni tipo de placa ni puerto serie. Abrimos un programa de ejemplo como el llamado «firstest.pde» que está en la carpeta «examples/input output».
11.- Enchufar un led a la patilla 0 (buscala en la serigrafia de la placa)
12.- Pulsamos el botón de grabación donde nos aparece la siguiente pantalla en la que tan solo tenemos que pulsar «Write» despues de haber pulsado y soltado la tecla de grabación de nuestra Pinguino. (esto puede ser liante al principio pero se le pilla el truco)
Bingo… led parpadeando… que os aproveche.
furri.
PD: Cuidadito con los leds de alta luminosidad…. 😛
Boops se me ha adelantado pero ya le estoy comiendo terreno con la tarjeta Pinguino de ARDE, ahora mismo estoy descargando el software y estoy buscando mi programador de pics que desde que trasladé mi ordenador al trastero de casa anda perdido por ahí….
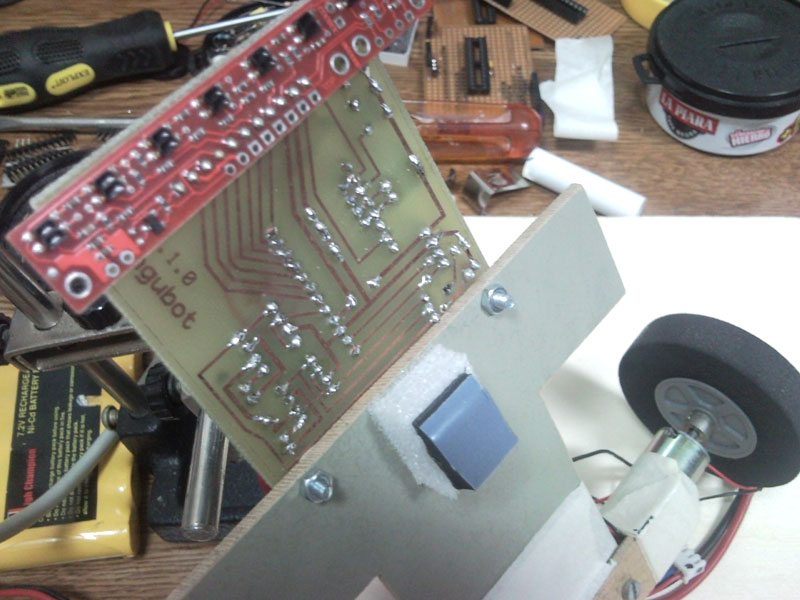
La impresión… muy buena, podeis ver la foto de la primera que he montado, ¿funciona?… pues aún no lo se… :), tan solo una cosa que no me esperaba y es el tamaño tan pequeño de algunos agujeros como los de los condensadores, xtal, etc… con mi soldador no ha sido facil aunque ninguno se me ha resistido mas de lo normal… ah, los condensadores del xtal los he tenido que soldar por la parte de abajo como podeis ver en la foto, hice algunas pruebas y al final no quise arriesgarme a que despues no entrara el zócalo.